EtherCAT 是开放的实时以太网络通讯协议,最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议。
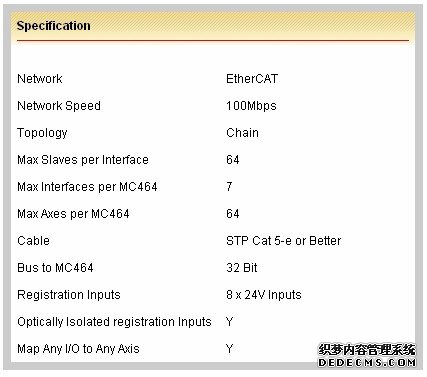
做为EtherCat主站模块,P876使得MC464成为了运动控制中独立的、EtherCat主站。这种模块使能够控制高达64个轴的MC464能够随意的配置兼容Ethercat总线的驱动器、电机或者其他配置。
EtherCAT在网络性能上达到了一个新的高度。1000个分布式I/O数据的刷新周期仅为30μs,其中包括端子循环时间。通过一个以太网帧,可以交换高达1486字节的过程数据,几乎相当于12000个数字量I/O。而这一数据量的传输仅用300μs。
与100个伺服轴的通讯只需100μs。在此期间,可以向所有轴提供设置值和控制数据,并报告它们的实际位置和状态。分布式时钟技术保证了这些轴之间的同步时间偏差小于1微秒。
利用 EtherCAT 技术的优异性能,可以实现用传统现场总线系统所无法实现的控制方法。这样,通过总线也可以形成超高速控制回路。以前需要本地专用硬件支持的功能现在可在软件中加以映射。巨大的带宽资源使状态数据与任何数据可并行传输。EtherCAT技术使得通讯技术与现代高性能的工业PC相匹配。总线系统不再是控制理念的瓶颈。分布式I/O的数据传递超过了只能由本地I/O接口才能实现的性能。
这种网络性能优势在有相对中等的计算能力的小型控制器中较为明显。EtherCAT的高速循环,可以在两个控制循环之间完成。因此,控制器总有可用的最新输入数据,输出编址的延迟最小。在无需增强本身计算能力的基础上,控制器的响应行为得到显著改善。
EtherCAT技术的原理具备扩展性,不束缚于100M带宽-扩展至G兆位的以太网也是可能的。
做为EtherCat主站模块,P876使得MC464成为了运动控制中独立的、EtherCat主站。这种模块使能够控制高达64个轴的MC464能够随意的配置兼容Ethercat总线的驱动器、电机或者其他配置。ETHERCAT模块配备了2个基本轴,可以使用“功能启用码”进行轴扩展,单CPU可扩至64轴。